Sonar - How Sound Waves Are Used to Detect Objects


Sonar is a technique that uses sound waves to locate and measure the distance to underwater objects. The name is actually a shortened form of Sound, Navigation, and Ranging. Sonar data is collected using echosounders and side-scan sonar systems. The digital data can then be converted into maps and images.
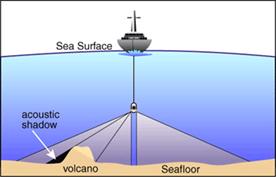
Sound is sent from the surface, called a ping, and it is then reflected back to the boat after it hits an underwater object. If you know the velocity of that ping, then you can calculate how deep the object is by timing how long it takes for the sound to return to the device. Since sound travels in water at a known speed, about 1,500 m/s, then calculation is a simple matter: Distance = speed x time / 2. Why divide by 2? Because the sound makes a round trip, first it has to go to the object and then bounce back.
Sonar was developed in 1906 by Lewis Nixon as a way to detect icebergs and prevent disasters. It turned out to also be useful during World War I for detecting German submarines. By World War II, sonar was used to find subs and then fire depth charges at them. Submarines were then developed to shield themselves from sonar detection. Shielding would include having quieter engines and a hull that was made of a material that would absorb sound rather than reflect it back to the sonar device on a surface ship. Such methods were not always effective.
 Sonar is used today to help oceanographers to map the ocean floor and even lakes. The valleys and ridges and even deep trenches can be cataloged without ever having to leave a ship. The data from sonar is entered into a computer program which then creates a model of the ocean floor.
Sonar is used today to help oceanographers to map the ocean floor and even lakes. The valleys and ridges and even deep trenches can be cataloged without ever having to leave a ship. The data from sonar is entered into a computer program which then creates a model of the ocean floor.
Fishermen can use sonar to help locate fish. Small devices can be mounted in a small fishing boat or even hand held. These devices will not necessarily make you an expert at catching fish though, because reading the device takes practice.
On the image, you can make out the floor of lake and two fish swimming above it. The device also shows depth and temperature. This area of the lake is 49 feet deep. Also, Knowing the fish are there doesn’t mean you can easily catch them and these also may not be the kind of fish you are interested in catching.
Sonar is also used to find treasure and sunken boats.. Sonar was used to find the wreckage of the Titanic, which sank in 1912. To find the Titanic a new type of sonar was developed, called the side-scan sonar. This kind of sonar requires a sound producing object to be towed underneath the boat. The sound is then projected from the object in a cone and can then create a detailed image of the sea bed. Images are made based on the strength of the return recorded. A stronger return is received if the seafloor slopes toward the instrument. Also, the return is stronger if the seafloor is made of bare rock, and weaker if the floor is made of sand or mud. All of this data can be used to get a very detailed picture of the ocean floor.
1. In order to calculate the distance of an object using a “ping”, what information do you need to know?
a. speed of sound in water
b. distance of the object below the surface
c. the frequency of the sound
2. Originally, sonar was developed for what purpose?
a. detect German submarines
b. find schools of fish
c. locate icebergs
3. Fishermen can use sonar to find fish underwater. These devices can NOT tell the fisherman
a. where they are located
b. how many there are nearby
c. what kind of fish they are
4. Which of the following is a practical application of sonar?
a. locating fish b. finding sunken ships
c. mapping the ocean d. all of these
5. What is an oceanographer?
a. a person who reads sonar
b. a person who studies the ocean
c. a person who studies fish
6. How does side-scan sonar differ from regular sonar?
a. the device is towed under water
b. it can make a detailed map of the ocean floor
c. both of these
 This work is licensed under a Creative Commons Attribution-NonCommercial 3.0 Unported License.
This work is licensed under a Creative Commons Attribution-NonCommercial 3.0 Unported License.